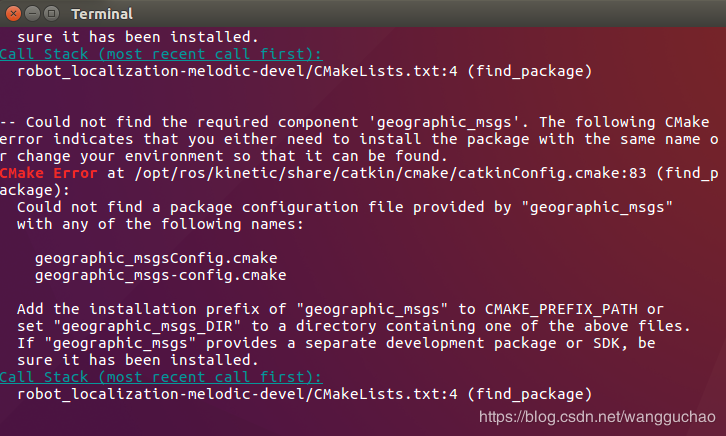
Could not find the required component 'geographic_msgs'. The following CMake error indicates that you either need to install the package with the same name or change your environment so that it can be found.
CMake Error at /opt/ros/kinetic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by "geographic_msgs"
with any of the following names:
Add the installation prefix of "geographic_msgs" to CMAKE_PREFIX_PATH or
set "geographic_msgs_DIR" to a directory containing one of the above files.
If "geographic_msgs" provides a separate development package or SDK, be
sure it has been installed.
紧接着编译仍然报错,
Could NOT find GeographicLib (missing: GeographicLib_LIBRARIES GeographicLib_INCLUDE_DIRS)
复制代码
然后安装了
sudo apt-get install libgeographic-dev
复制代码
5. 当Ubuntu install某个东西时,给出下面提示
E: Could not get lock /var/lib/dpkg/lock-frontend - open (11: Resource temporarly unavailable)
E: Unable to acquire the dpkg frontend lock (/var/lib/dpkg/lock-frontend), is an other process using it?
 发表于 2020-5-1 13:30:27
13100 浏览 3 回复
发表于 2020-5-1 13:30:27
13100 浏览 3 回复