文章选自博客 https://blog.csdn.net/qq_15390133/article/details/105161481
[color=rgba(0, 0, 0, 0.75)]配置:Vmware14 虚拟机, Ubuntu18.04 LTS 版本。台式机Win10系统,8G内存,i7-6700四核
整个配置过程基本按照官网操作。虚拟机配置如图
进入ubuntu18.04之后,首先配置网络,然后依次输入下列指令即可
1、apt-get update -y
apt-get upgrade -y
2、sudo apt install git
3、git clone https://github.com/PX4/Firmware.git
4、git submodule update --init --recursive
5、bash ./Tools/setup/ubuntu.sh
6、wget https://raw.githubusercontent.co ... _sim_ros_melodic.sh
7、bash ubuntu_sim_ros_melodic.sh 注:1)https://blog.csdn.net/qq_4380259 ... _relevant.none-taskGazebo [Err] [REST.cc:205] Error in REST request 问题的解决 $ sudo gedit ~/.ignition/fuel/config.yaml然后将 url : https://api.ignitionfuel.org 用 # 注释掉添加 url: https://api.ignitionrobotics.org 2)内存不足 **(Swap空间只有2G,后分配成4G才可以)**编译出错c++: internal compiler error: Killed (program cc1plus) https://blog.csdn.net/AlexWang30/article/details/90341172
3)git describe --always --tags 查看版本号
4)chrome和vscode可以从网页直接下载安装
5)sudo usermod -a -G dialout $USER
sudo apt-get remove modemmanager -y
sudo apt install gstreamer1.0-plugins-bad gstreamer1.0-libav -y
从官网下载QGC
chmod +x ./QGroundControl.AppImage
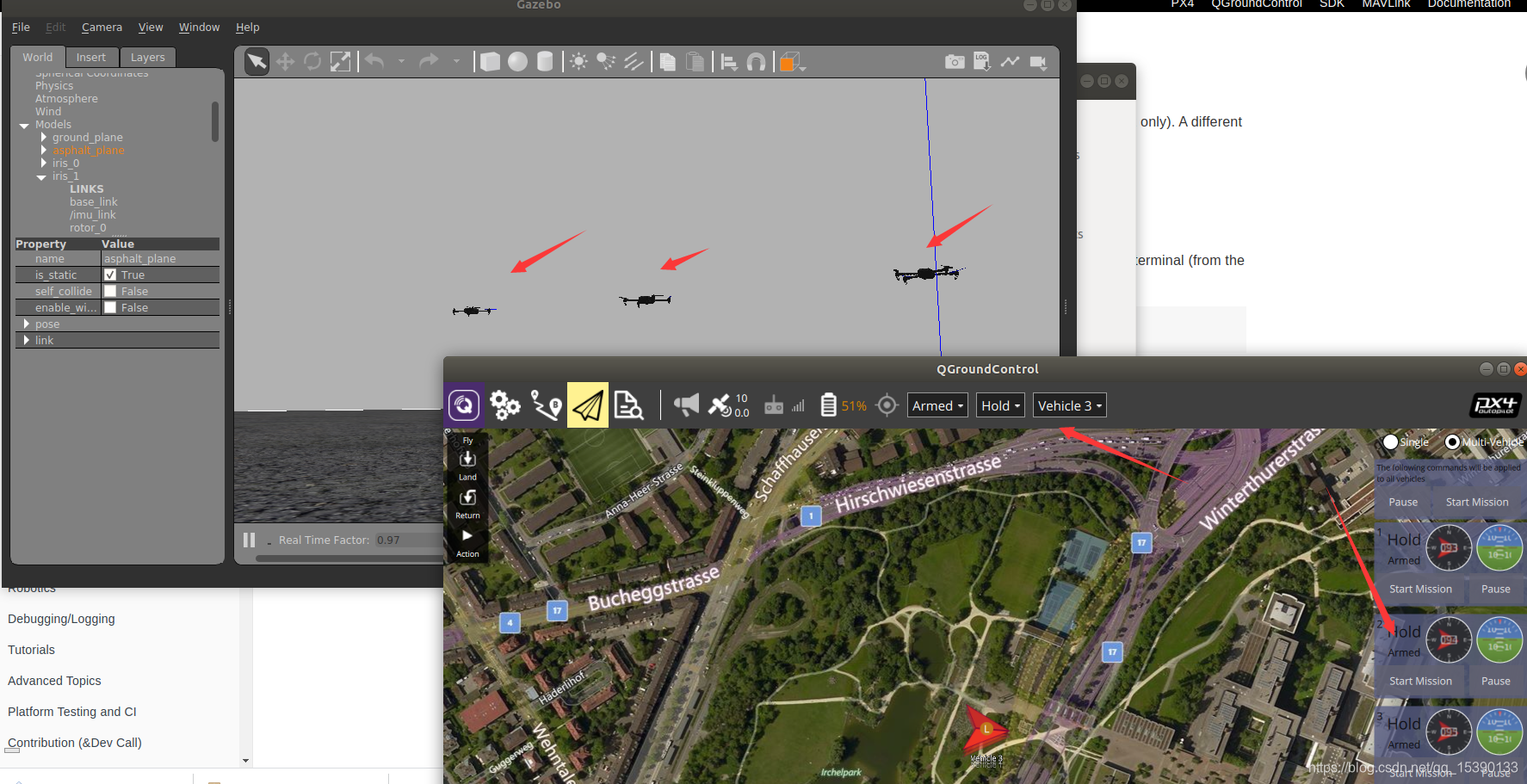
./QGroundControl.AppImage (or double click) 然后就可以使用模拟器了 ( 实际运行过程中,该配置下电脑会比较卡,在此建议采用物理机进行) Tools/gazebo_sitl_multiple_run.sh [-m <model> [-n <number_of_vehicles>多级gazebo , 默认三架飞机
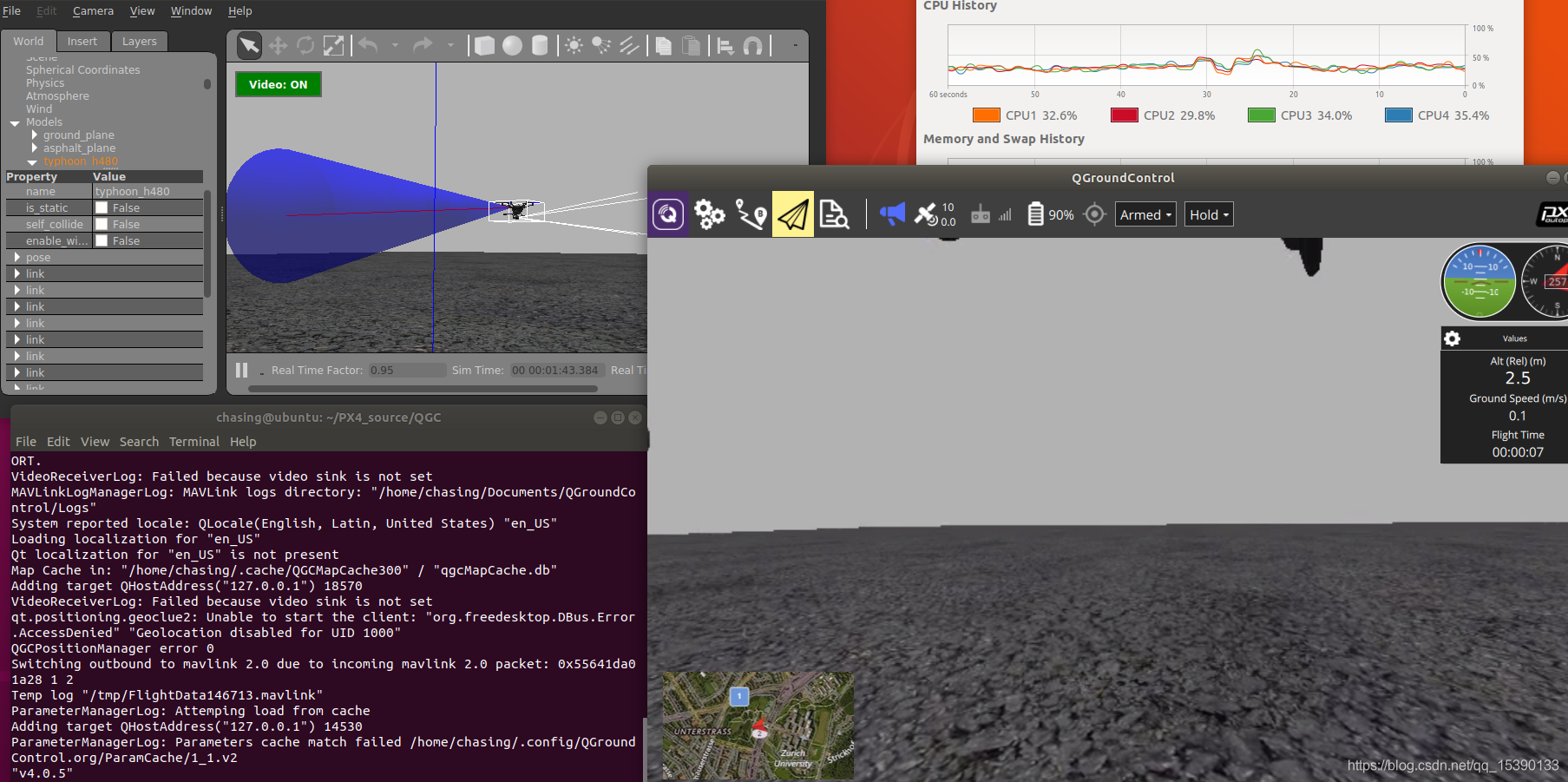
下图为启动带有摄像头的四轴gazebo仿真,指令如下,QGC默认配置即可。
make px4_sitl gazebo_typhoon_h480
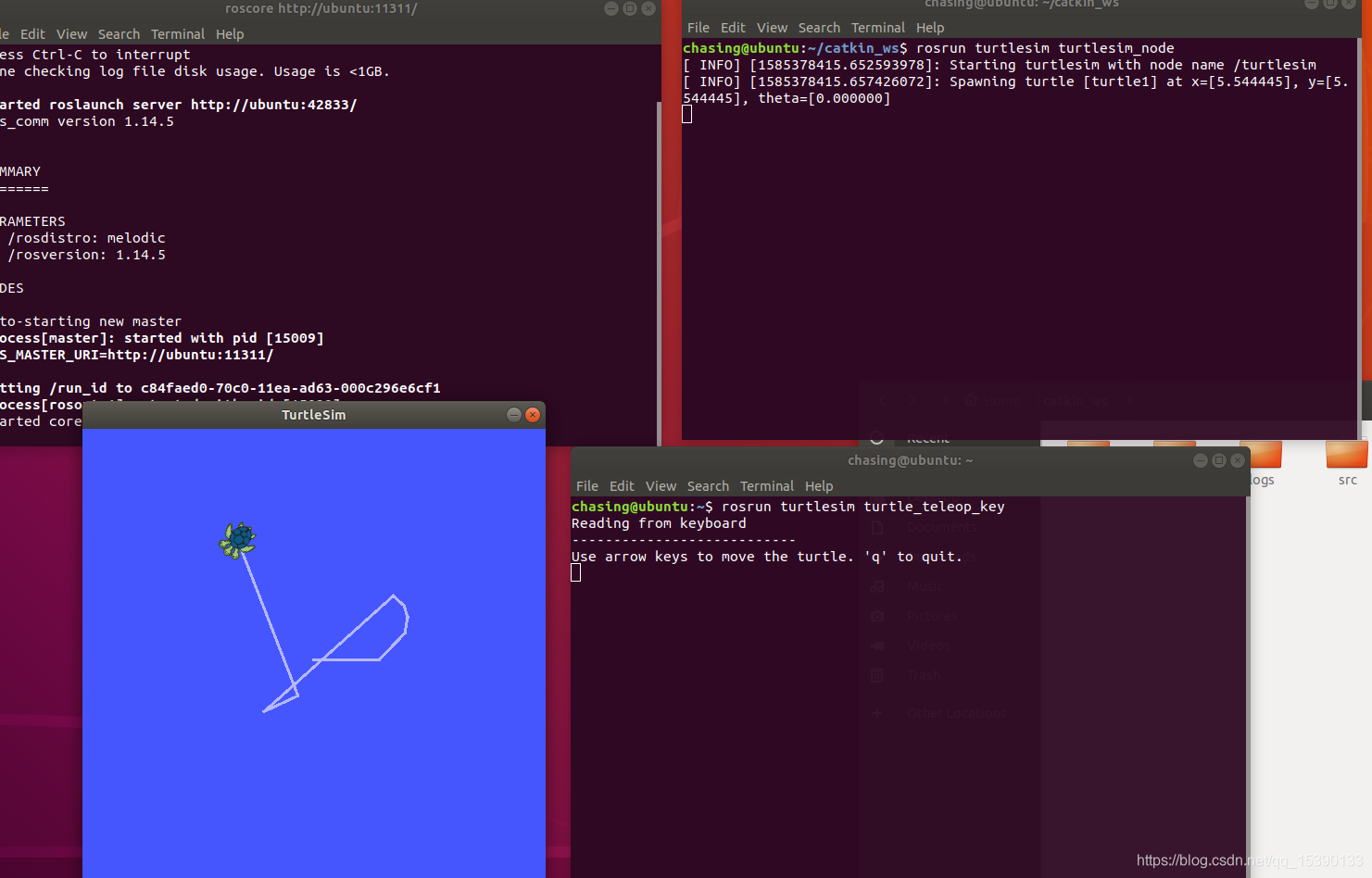
Ros历程,小乌龟启动界面。(Roslaunch启动gazebo也可以)
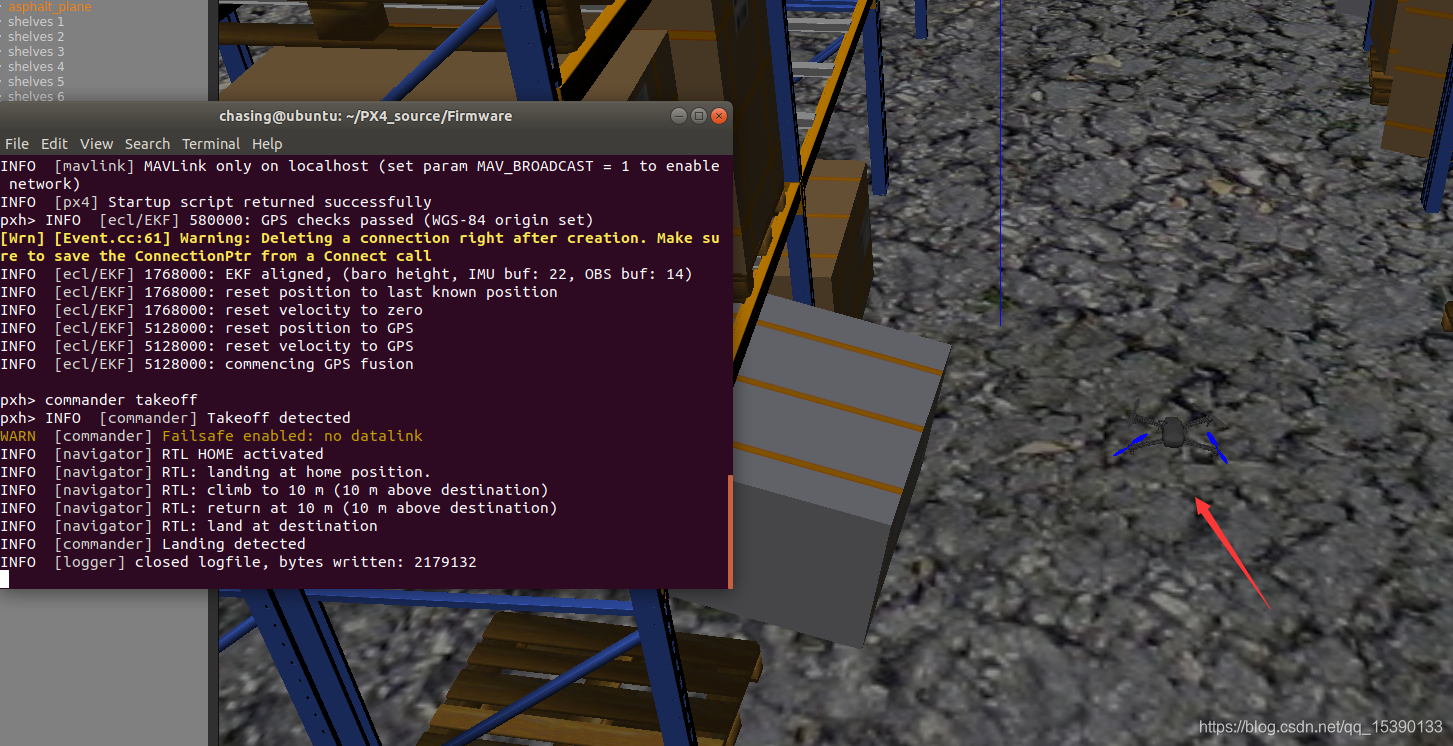
换个场景,可以采用如下指令格式
make px4_sitl_default gazebo_iris__warehouse
[color=rgba(0, 0, 0, 0.75)]
|  发表于 2020-3-30 16:11:13
8423 浏览 0 回复
发表于 2020-3-30 16:11:13
8423 浏览 0 回复