|
|
 发表于 2020-5-31 19:22:54
14221 浏览 2 回复
发表于 2020-5-31 19:22:54
14221 浏览 2 回复
[入门教程]
Linux下cmake编译流程实践--初学篇
本帖最后由 chasing 于 2020-5-31 19:28 编辑
Linux 下文件颜色说明
1. 红色表示压缩包文件
2. 绿色代表可执行文件
3. 蓝色表示文件夹
4. 白色表示一般性文件
Linux 下hello SLAM 工程编译
参考视觉SLAM工程,设计最简单的文件如下:
- #include<iostream>
- using namespace std;
- int main(int argc, char** argv)
- {
- cout<<"Hello, SLAM!"<<endl;
- return 0;
- }
`g++ hello.cpp` 则默认编译生成`a.out`,若要指定文件名,则采用`g++ -o hello.out hello.cpp`
在实际操作过程中,则采用cmake来管理代码,此方法管理多文件时比较方便。首先创建`build`文件夹就用来存储生成的中间文件,然后创建并编辑`CMakeLists.txt`文件如下:
- #声明Cmake的最低版本信息
- cmake_minimum_required( VERSION 2.8)
- #声明一个cmake工程
- project( HelloSLAM)
- #添加执行文件
- add_executable(HelloSLAM hello.cpp)
编译过程中,先进入build文件夹,然后
工程中使用库
首先编写库文件,这里创建libHelloSlam.cpp,以及libHelloSlam.h,其中CPP文件如下:
- #include<iostream>
- using namespace std;
- void printHello()
- {
- cout<<"hello SLAM"<<endl;
- }
添加 `CMakeLists.txt`文件内容
- cmake_minimum_required( VERSION 2.8)
- project( HelloSLAM)
- add_executable(HelloSLAM hello.cpp)
- add_library(libHello SHARED libHelloSlam.cpp)
- #ifndef LIBHELLOSLAM_H_
- #define LIBHELLOSLAM_H_
- void printHello();
- #endif
创建主函数,以及修改调用
- #include "libHelloSlam.h"
- int main( int argc, char** argv)
- {
- printHello();
- return 0;
- }
- cmake_minimum_required( VERSION 2.8)
- project( HelloSLAM)
- add_executable(HelloSLAM hello.cpp)
- add_executable(useHello useHello.cpp)
- target_link_libraries(useHello libHello)
- add_library(libHello SHARED libHelloSlam.cpp)
至此,完成最后的cmake,以及make指令就可以实现调用库函数输出了。
在实际使用C++工程中,常采用这种方法实现整个工程的编译。
一个不是很恰当的例子:Eigen库的使用
之所以选用eigen库,是因为eigen库在APM,PX4以及SLAM中都会用到,是一个常见的高效的矩阵运算库。在Ubuntu的安装方法为:
- sudo apt-get install libeigen3-dev
- cmake_minimum_required( VERSION 2.8)
- project( HelloSLAM)
- add_executable(HelloSLAM hello.cpp)
- add_executable(useHello useHello.cpp)
- target_link_libraries(useHello libHello)
- add_library(libHello SHARED libHelloSlam.cpp)
- include_directories("/usr/include/eigen3")
- add_executable(eigen_learn eigen_learn.cpp)
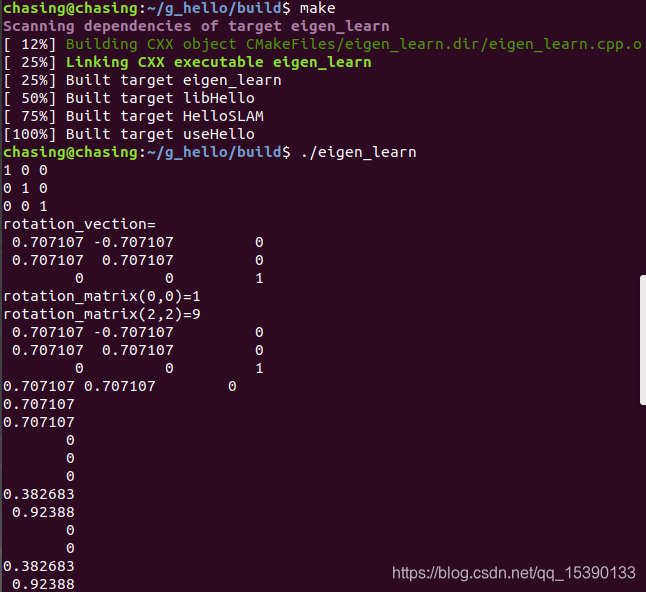
给出参考的`eigen_learn.cpp`文件如下:
- #include <iostream>
- #include <cmath>
- using namespace std;
- #include <eigen3/Eigen/Core>
- #include <eigen3/Eigen/Geometry>
- using namespace Eigen;
- int main(int argc, char** argv)
- {
- Matrix3d rotation_matrix = Eigen::Matrix3d::Identity();
- cout<<rotation_matrix<<endl; //output the 3*3 identity matrix
- rotation_matrix<<1,2,3,4,5,6,7,8,9; //init the value
- Eigen::AngleAxisd rotation_vection (double(0.25*M_PI), Eigen::Vector3d::UnitZ());
- //rotation 45 degree along z axis
- cout<<"rotation_vection=\n"<<rotation_vection.matrix()<<endl;
- cout<<"rotation_matrix(0,0)="<<rotation_matrix(0,0)<<endl;
- cout<<"rotation_matrix(2,2)="<<rotation_matrix(2,2)<<endl;
- rotation_matrix = rotation_vection.toRotationMatrix();
- cout<<rotation_matrix<<endl;
- Eigen::Vector3d v(1,0,0);
- Eigen::Vector3d v_rotation = rotation_matrix*v;
- cout<<v_rotation.transpose()<<endl;
- cout<<v_rotation<<endl;
- //quat
- Eigen::Quaterniond q;
- q = Eigen::Quaterniond(rotation_vection);
- cout<<q.coeffs()<<endl;
- q = Eigen::Quaterniond(rotation_matrix);
- cout<<q.coeffs()<<endl;
- return 0;
- }
注:先包含头文件,才能使用`using namespace Eigen;`使用命名空间后,`Eigen::`可以省去。上述程序的输出结果为:
文章原博客网址:https://blog.csdn.net/qq_15390133/article/details/106457036
|

扫一扫浏览分享
|
|
|
|
|
|
|
|
|

|