本帖最后由 amovchun 于 2020-2-20 10:02 编辑
我们阿木实验室制作了一套无人系统仿真开发环境包含软件例程,视频教程,配套的硬件设备,搭建了完整的ROS/MAVROS/Gazebo环境。让大家在家里也可以不受设备的限制来学习无人系统的开发。
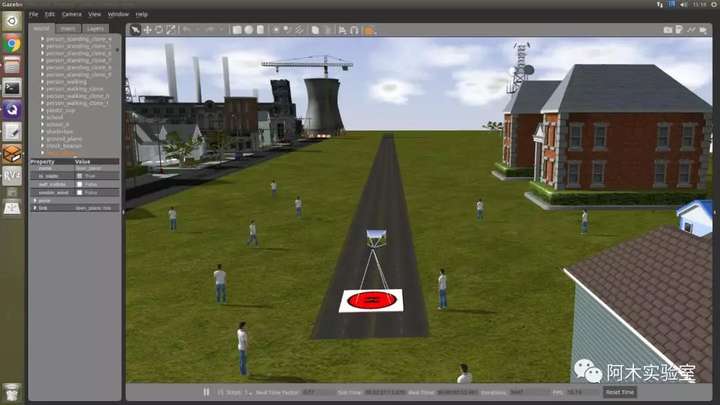
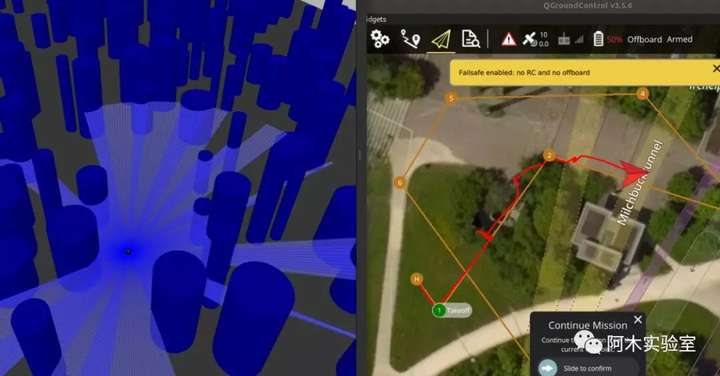
你只需要准备好一台电脑就可以,安装好我们提供的软件环境。可以学习PX4无人机三维仿真开发,包含智能无人机开发仿真环境搭建,无人机自主飞行初步,无人机激光雷达避障自主飞行,提供完整的接口,方便大家做进一步的智能开发,涉及路径规划,自主决策等。用这一套开发环境和例程,开发者不用再去准备一台真实的无人机,在家就可以做自主无人机的开发工作,非常方便和高效。
推荐仿真电脑的硬件配置:I5的台式机/或者4核8线程的笔记本电脑,8G内存,128固态硬盘。
同时我们也推荐给大家一台,集合完整开发环境的机载计算机,可以做仿真开发,可以安装在无人机上作为板载计算机,总重量350克左右。
如下图:
阿木实验室同时希望有好的算法想在无人仿真系统上实现的研究者,联系我们,我们帮助你优化相关代码,移植到仿真环境之中。本套环境课程,我们提供了完整代码框架,非常方便大家做进一步的二次开发,可以在我们的基础上实现强化学习,视觉追踪引导,激光/视觉SLAM等研发工作,提供一些例程Demo。
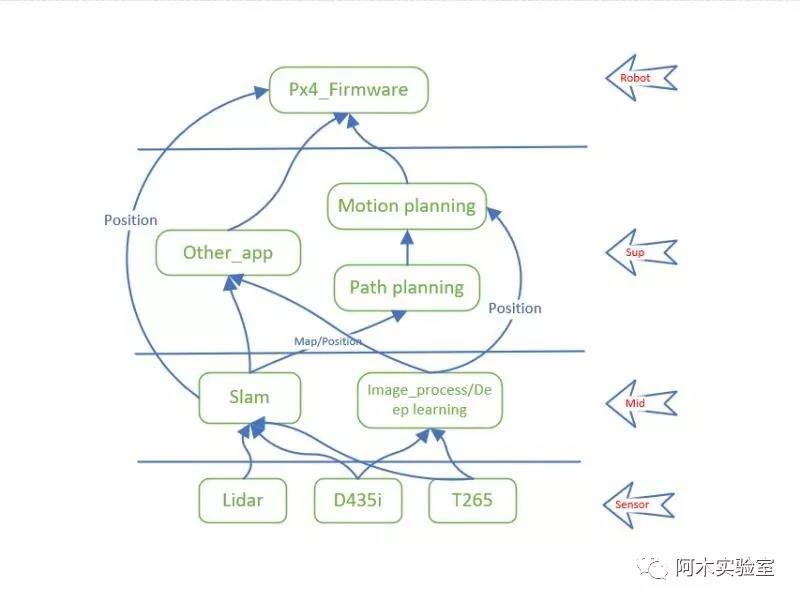
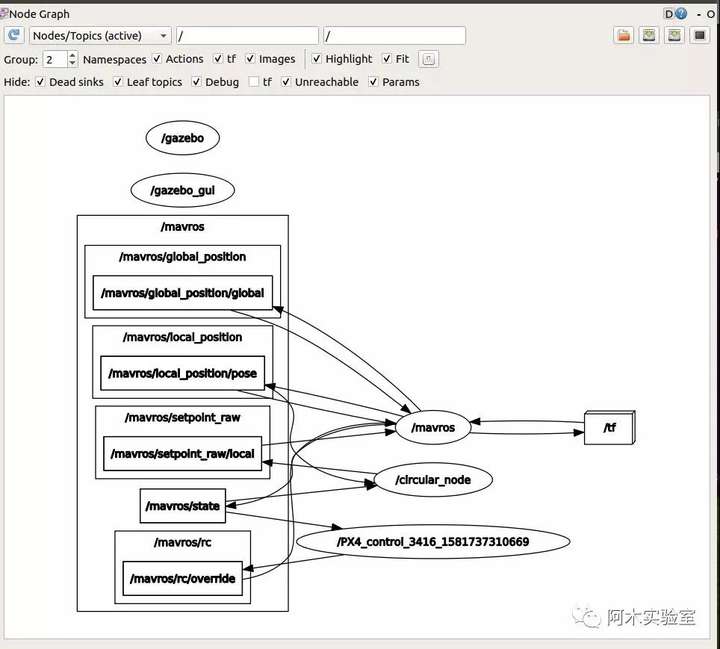
对于付费购买的用户我们提供完整的ISO安装镜像和视频教程资料,省去安装环境等麻烦问题,迅速入手开发。我们同时推荐一台机载计算机,X86构架,重量350克,搞研发利器,可以用于开放电脑完成仿真开发,PX4固件编译,同时比较轻便可以放到无人机上作为机载计算机,非常方便,8代I7处理器可以完成大部分的复杂算法处理需求 对于感兴趣的同学,我们提供开放的Github下载链接去下载研究。系统框架如下: 课程大纲基于Ros的无人机仿真开发 第一章:仿真系统软件硬件框架及其系统安装 1.1 系统概述 1.2 软件构架 1.3 硬件要求 1.4 启动盘制作 1.5 系统安装 第二章:仿真系统软件介绍及其初步使用 2.1 软件安装 2.2 代码更新 2.3 代码软件框架 2.4 重新编译确认开发环境 2.5 地面站模拟航点飞行 2.6 键盘控制虚拟环境飞行 2.7 Offboard模式自动飞行一个圆形 2.8 二维激光雷达避障飞行 第三章:仿真系统Ros/Gazebo例程代码分析 3.1 系统概述 3.2 Offboard自动飞行圆例程分析 3.3 激光雷达避障流程分析(VFH算法) 3.4 使用Python控制无人机 第四章:仿真系统与真机切换实践飞行操作 4.1 真实无人机硬件安装 4.2 软件脚本修改和环境配置 4.3 室外真机Offboard模式飞行圆 (建议去PC端购买观看本视频教程)
阿木实验室之前的P200客户免费提供观看播放码 硬件购买链接(3月10号之前发货):
|  发表于 2020-2-20 10:00:53
16761 浏览 2 回复
发表于 2020-2-20 10:00:53
16761 浏览 2 回复