0.如何使用模型
上篇从零开始建模(一)-牛顿欧拉方程我们建立的飞行器的模型。
得到了飞行器的模型,该如何使用呢?这个方程的输入是什么?之前说过输入是力,输出是加速度,那这个方程里还有其他变量不知道,有输入得不到输出呀。
我们来回忆一下小车的速度是如何更新的。

在我们更新速度的时候也是需要根据上一时刻速度信息的。
所以模型的更新,也是一个迭代过程。
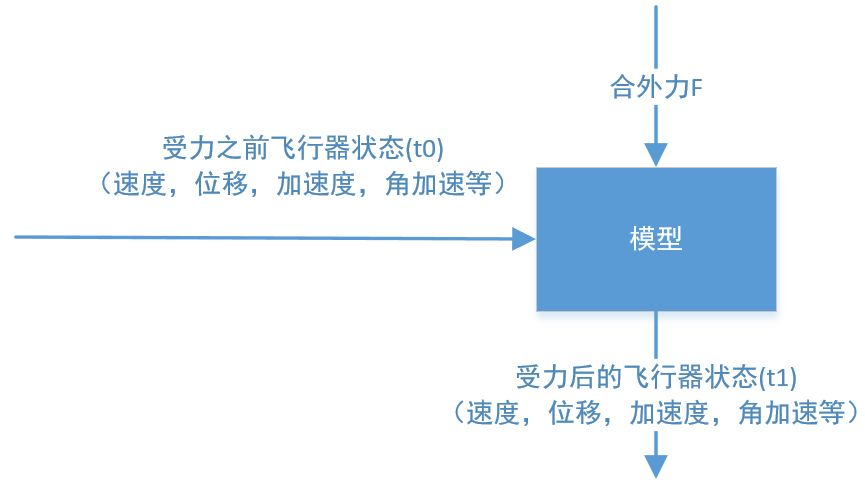
如何使用这个模型呢?你得有个初始状态,然后根据当前的受力,就可以得到下一时刻的加速度,和角速度。
1.状态更新
我们在控制飞行器时候,最需要的状态并不是加速度,我们想要的是飞行器的状态,什么是状态速度,位置,角速度,和角度等等都是它的状态,其中最关键的状态就是角度,也就是我们说的欧拉角(一种姿态的描述方法)。
跟小车一样,加速度积分得到速度,速度积分得到位移。
那么同理,角加速度积分得到角速度,角速度积分得到角度。
结束了,姿态更新不过就是几个积分过程。
其实还真可以就到这里结束,你用这种方式得到状态就可以着手设计你的控制器了,那么下期为大家带来简单的控制器思路,敬请期待。
好了好了不皮,上面的思路确实是可以的,用于快速验证思路完全没问题的。
重新思考一下,状态更新的目的是什么,状态更新的目的是通过角速度得到姿态,姿态是什么?是旋转,旋转可以如何表示?欧拉角,四元数,轴角,旋转矩阵。
我们按照这个目标,从模型的输出角速度一步一步分析。
2.角加速度的积分是什么
在模型中我们求出的角加速度,是根据每个轴的力矩分析得到的,是相互独立的,所以它的积分得到的就是每个轴独立的角速度w。

3.姿态变化率和机体角速度
我们通常认为

所以

但是实际上是这样的,欧拉角的微分方程是这样的,已知角速度求角度。
欧拉角是一个跟旋转过程有关的三个角,并不是完全独立的,是非正交的,所以三个角之间是有耦合的。而通过力矩分析得到的角速度则是完全独立的,正交的。
欧拉发现,从任何一个参考系,经过三种特定的转动,可以转到三维空间内任何参考系。这三种特定转动的角度就是欧拉角。——维基百科
根据这个方程,只有在三个角度非常小的时候,才有:
这就是为什么我们建模的时候会强调一句,假设角度非常小。只有在角度非常小的时候,角速度的积分才会等于欧拉角。
所以如何通过角速度得到欧拉角呢?如果你不想假设角度非常小,解这个方程就行了。
但是要解这方程可可太难了,系数是个变化的量而且角度之间有耦合,现在是不是可以直观理解到为什么书上说欧拉角不好用,非线性,耦合,在方程中一目了然。这个方程解不了怎么办呢?(数学重要不!不好好学,给你个方程你都解不了)
4.四元数微分方程
别急,我们想要的是姿态,姿态除了欧拉角还有四元数形式呢。
这个就是四元数微分方程
这个方程,系数是已知数的微分方程在数学上有很多方法可以,我们经常听见的毕卡法,龙格库塔法,都是解微分方程的方法,其实我们通常用积分的方法解微分方程在数学上叫矩形法,可以查关键词“数值分析”里面有介绍如何通过离散的方法解微分方程。(这些方程的解法具体过程在《惯性导航》中有非常详细的过程)
现在你是不是更加理解为什么欧拉角这么直观,这么好看,还有有其他表示姿态的方法呢?因为欧拉角不好用呀,方程不好解呀!
5.总结
1.模型使用时是个迭代过程。
2.姿态的更新的目的是通过角速度得到姿态
3.为了得到姿态,我们需要解微分方程。
4.姿态有很多种形式可以表示
这个姿态更新过程为什么要做其实都是为了之后控制做准备,知识点其实比较多,关键词我都给出来了,感兴趣的可以自己继续深入查资料哦。虽然知识点越来越多,但是随着了解的深入,你会感受到更多的魅力,而且我会持续更新,一起学习吧。
我还想请认真看的同学思考几个问题,为什么我们一定要求姿态呢?三个独立的角速度直接积分得到的是三个独立的角,用这个角不行吗?
个人微信公众号【zinghd的思考】,欢迎交流
 发表于 2019-6-21 22:24:14
12068 浏览 1 回复
发表于 2019-6-21 22:24:14
12068 浏览 1 回复

